激光雷达常见问题解答
Q:角分辨率是什么意思?
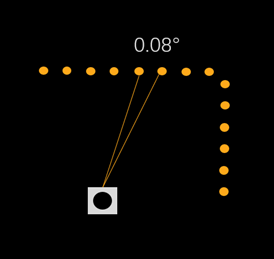
A:激光雷达输出的图像也被称为“点云”图像,相邻两个点之间的夹角就是角分辨率。星秒PAVO提供最高0.08°的角分辨率。
Q:帧率代表的意义是?
A:一幅点云图像代表一帧,对应到激光雷达内部就是电机旋转一圈完成扫描。帧率即代表一秒钟内激光雷达电机旋转的圈数,也就是每秒钟完成一圈扫描的次数。
Q:角分辨率和帧率有什么关系?和采样率又是什么关系?
A:由于激光雷达的采样率是一定的,因此帧率越高,角分辨率越低;帧率越低,角分辨率越高。PAVO的最小角分辨率0.08°对应的是帧率10Hz的条件下,当帧率设置为20Hz时,角分辨率自动变成0.16°。
采样率表示激光雷达每秒钟进行有效采集的次数,可直观理解为一秒内产生的点云数目。采样率可以通过角分辨率和帧率计算:
角分辨率0.08°时,每一帧的点云数目:360°/0.08°= 4500;
每秒10帧,则每秒的点云数目:4500×10=45000;
所以PAVO的采样率为45kHz。
Q:激光雷达可以检测到透明玻璃吗?
A:激光雷达是基于光学检测原理,激光会穿过透明玻璃,从而造成一定概率的漏检。我们建议针对玻璃很多的场景使用时,可以增加一些辅助反射手段,比如粘贴磨砂贴纸,或配合其他非光学的传感器作为补充。
Q:激光雷达对眼睛有害吗?
A:我们的雷达产品执行class I激光人眼安全标准,其激光强度低于人眼的损伤阈值,不会对眼睛造成伤害。当然我们仍然建议不要长时间近距离的直视激光雷达,并在安装时尽量避免放置在和人眼平视平面相同的高度。
Q:激光雷达测距范围指标为什么标注有两个距离?
A:激光雷达的测距依赖激光照射在目标物体上的反光,而白色的表面反射率高,黑色的表面反射率低,不同反射率会对雷达的有效量程造成差异。
Q:TOF雷达和三角雷达有什么区别?
A:TOF方案基于时间飞行测量,三角雷达基于几何光学运算。详细的说明和对比请见星秒的另一篇技术文章:
优劣几何?三角法和TOF激光雷达大解析!
http://www.siminics.com/Surport/Detail?id=27
Q:点云数据合并是什么意思?

A:点云数据合并是指把相邻的点合并成一个点,一方面可以减少图像的数据量,另一方面可以增加点云的稳定度。
Q:点云上的拖尾是怎么产生的?有什么办法解决吗?
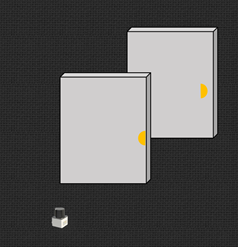
A:PAVO每次采样时发送一个激光脉冲完成测量。理想的激光脉冲打在目标上是一个点,但是实际上激光出射都存在一定的发散角,打在物体上时光斑是一个面。因此,当存在前后两个物体,且激光正好打在前面一个物体的边缘时,就有可能出现一部分激光能量打在了后面的物体上,这时的回返光就是两个光斑反射光的叠加。这时雷达会判断测量目标在这两个面之间,造成拖尾现象。
拖尾现象需要借助算法去除,星秒的雷达软件包提供点云消除的算法,可以有效改善拖尾现象。
Q:是否支持二次开发,基于什么平台,什么语言?
A:星秒提供完善的SDK,基于c++语言编写,支持二次开发,兼容windows, linux + ros等操作环境。